Todd R. Coon and Dr. Larry Howell, Mechanical Engineering
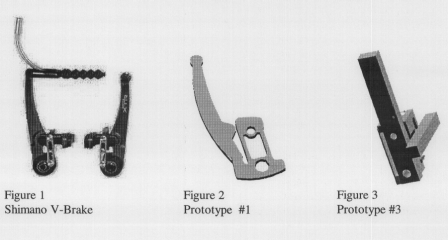
Shimano corporation, the market leader in bicycle components, sells a class of brakes titled “Vbraketm” that has a strong braking force and travels in a horizontal motion. The V-brake (Fig. 1) uses a four-bar mechanism to direct its motion. The goal of this design project was to use new technology to achieve the same performance as the V-brake while significantly decreasing the part count and the complexity of the design.
A theory was recently developed1 which allows a designer to approximate a single flexible member as a rigid link with two pin joints. By fixing both ends of a beam, one can know how the beam will react when it goes through large deflections. The theory, known as the Pseudo Rigid Body Model can be applied to mechanism design where a four-bar mechanism with four links and four pins can be replaced with a solid object with two compliant (flexible) sections.
The design process began by developing a set of functional specifications which clearly identified items that the design had to satisfy. The following is a list of the functional specifications:
6. The brake must not require modifications to bicycle frame.
7. The brake must be reliable.
8. The brake should have a low part count.
9. The brake should have a fine adjustment.
10. The brake must allow the tire to be removed easily.
11. The brake must be light.
12. The brake must be aesthetically pleasing.
The first prototype (Fig. 2) was designed using polypropylene because of its favorable strengthtomodulus ratio. This design had no pin joints yet had the same motion as the V-Brake. An advantage to the model was that it contained an intrinsic spring force that eliminated the need for an auxiliary spring that the V-brake and other linear pun brakes require. Unfortunately, the polypropylene was subject to creep and was not strong enough to withstand the force created by the wheel.
Titanium was chosen for the flexible segment in the second prototype because it is not subject to creep and because it has the most favorable strength-to-modulus ratio of all the metals examined. Titanium is an expensive material, so the entire braking system was redesigned to decrease manufacturing costs. With the help of the M.E. machine shop, a working prototype of the brake was created. The second prototype had two pin joints but met more of the functional specifications than the first. A thin piece of titanium acted as the second set of pins and the parallel link. The brake traveled horizontally into the rim but had a weak spring force and stayed permanently bent (it yielded) when flexed. It was an encouraging prototype because the majority of the body was aluminum and could withstand the forces involved in braking.
The third prototype (Fig. 3) was similar to the second. The titanium member was made longer and wider. This allowed for the brake shoe to travel a larger distance before permanently bending. A slot was built giving the user the ability to adjust the location of the brake vertically. An adjusting mechanism was included which controls when the spring force will engage. This tension-adjusting feature will help the brake shoes to contact the rim simultaneously. The adjusting mechanism also allows the brakes to swing open when removing the tire from the bicycle. All of the functional specifications were met except for the weight and aesthetics. These criterion will be met in the next prototype.
This research project was a valuable learning experience. The compliant brake had many tradeoffs that had to be satisfied. The complaint member had to flex, which required it to be thin. It also had to provide a spring force which comes from thickness and width. There are limits to how thick the member can be and still allow a bicyclist access to brake adjustment. These were just a few of the factors which were evaluated in the design. Objective values for factors such as spring force and flexing distance were decided upon, and the optimization feature in Quattro Pro was used to help select critical dimensions.
Overall, the design is an improvement on the V-brake. The number of parts not common to both designs is reduced from 24 to 13. The concept has been presented to the BYU Technology Transfer department for patent consideration.
References
- Howell, et al., Journal of Mechanical Design, Trans. ASME, Vol. II 8, No. 1, pp. 126- 131.
- This research was supported by the Office of Creative Research and NSF grant DMI- 9624574. The assistance from Ken Forster in the M.E. Machine Shop, and Dr. Larry Howell is gratefully acknowledged.