Jeff Young and Dr. Larry Howell, Mechanical Engineering
Much research is being done around the world in the field of micro-electro-mechanical systems (MEMS). MEMS are devices such as linkages, actuators, gears and motors built on a scale of microns. MEMS have many potential applications in medical science, electronics and other areas where smaller, more intricate, and more innovative solutions are continually required. Essential to the practicality of MEMS is the ability to design for predictable and reliable behavior. The extremely small size of these devices presents difficulty in realizing a design. Joining separate elements into operative assemblies is very difficult at the micro scale. A sound solution to this problem is found in compliant mechanisms. Compliant mechanisms are kinematic devices that derive their motion through elastic material deformation. These mechanisms require fewer parts than their traditional counterparts because they reduce the need for joints and other mechanical connections. Researchers at Brigham Young University are developing both theory and applications for compliant mechanisms, including compliant MEMS.
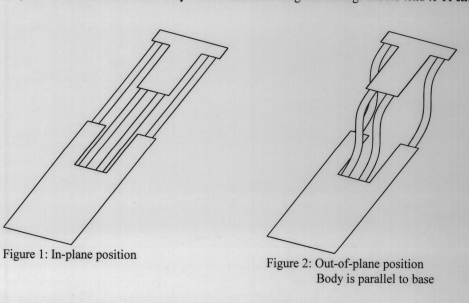
This research project revolved around evaluating a particular micro mechanism. The mechanism theoretically allows motion out of the plane in which it normally lies while remaining parallel to that plane (see figures 1 and 2). The purpose of the research was to analyze the motion, predict the failure, verify modeling techniques, and recommend future designs for this out-of-plane MEMS. This was to be done by finite element modeling, statistical analysis, and creation and testing of the actual sized MEMS as well as similarly proportioned, large scale out-of-plane devices.
Several parameters (leg length, leg width, body length) of the out-of-plane MEMS were varied according to a designed experiment. To gain useful statistical information from the experiment, nine separate MEMS were designed, so as not to confound the effect of parameter variation. These designs were implemented with the MEMS, the larger scale out-of-plane device, and the finite element model.
The MEMS were designed and prepared for fabrication, as were the large-scale devices. This work will allow future students to compare the theoretical results of this study to future physical testing.
The research produced important information. Emphasis was placed on how parallel the body of the MEMS stayed relative to the base throughout its range of motion. The finite element model of the MEMS in question was judged with respect to the motion characteristics. These models allow the prediction of the position of the body relative to the base. The results were evaluated statistically to reveal to what extent the parameters affect the parallel motion of the micro mechanism. This is critical for the design of future MEMS.
The results produced by this research validate basic assumptions made about this out-ofplane MEMS. It was assumed that a MEMS with short, thin legs and a long body would be the most parallel. This is largely supported by the findings. There are several statistically significant effects. The leg length and the body length both strongly influence the degree to which the body deviates from parallel. The leg-length effect is positive, which means that an increase in leg length gives a MEM that is less parallel. The bodylength effect is negative, which means that an increase in body length improves the parallel inclination of the MEM. A surprise finding is that leg thickness has a very small effect on the parallel motion of the MEM. It affects the motion to so small a degree that it cannot be proven statistically to have any effect at all. Design recommendations would therefore follow intuition. For maximum parallel motion for this out of plane micro mechanism the body should tend to be long and the legs should tend to be short.