Adam Brandt and Dr. Mark Colton, Mechanical Engineering
The remote operation of a quadrotor unmanned aerial vehicle (UAV) presents unique challenges to the pilot. When flying a traditional aircraft a camera can be directed so that the field of view points out the nose, which is always in the direction of flight, assuming small side-slip angles. Using this camera, a remote pilot can always see obstacles that the aircraft is approaching and respond appropriately to avoid them.
Quadrotors are omnidirectional, meaning they can move in any direction. This is an obvious problem for remote operators since the quadrotor can move in a direction that is not aligned with the camera. One may limit the motion of the quadrotor to be only in the direction of the camera, but one of the main benefits of using this particular aircraft is for its for it’s mobility. Another option would be to build a camera that rotates to point in whatever direction the quadrotor is moving. Of course there would be a time delay in moving the camera to the correct position, and the pilot may desire to look in a direction other than the direction of motion.
A solution that others have been developing is to use haptic (force) feedback directed through the controller to give the pilot a greater situational awareness. When the quadrotor is approaching an obstacle, forces are applied to the pilot’s hand pushing in the direction opposite of the obstacle. The research thus far has been limited to simulation and the simulations have only been 2 dimensional with 2 degrees of force feedback.
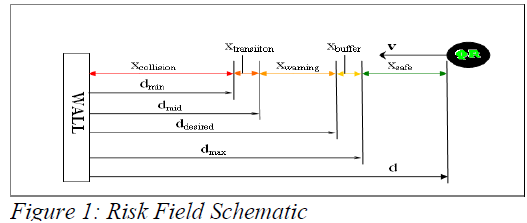
Using a risk field approach, I have developed a new force feedback algorithm that is similar to other risk fields developed previously, but fundamentally different. Rather than basing the forces on a maximum acceleration, which does not take into account dynamics, it is based on the minimum distance required to stop with the given UAV dynamics. The forces felt by the user will increase as the quadrotor get closer to the minimum distance. Another difference from other risk fields is that there is a jump in forces just before the UAV reaches the minimum distance. This serves as a warning to the user that he is about to reach a “point of no return”. A schematic of this new risk field is shown in Figure 1.
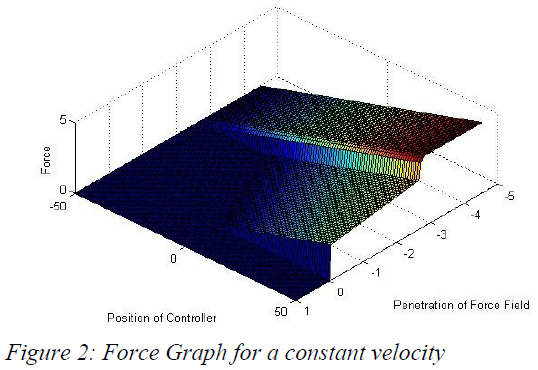
One main problem in other force feedback algorithms is that the forces are sometimes overactive and can actually push the UAV into obstacles while trying to push away from others. To solve this problem, I added a the position of the controller as a new force dependency. If the user feels a force pushing his hand in a certain direction and he moves his hand in that direction, the forces will decrease. This way, if the user is doing the right thing, taking action to avoid the obstacle, the the forces will not continue to push them. Figure 2 shows force vs. field penetration and controller position.
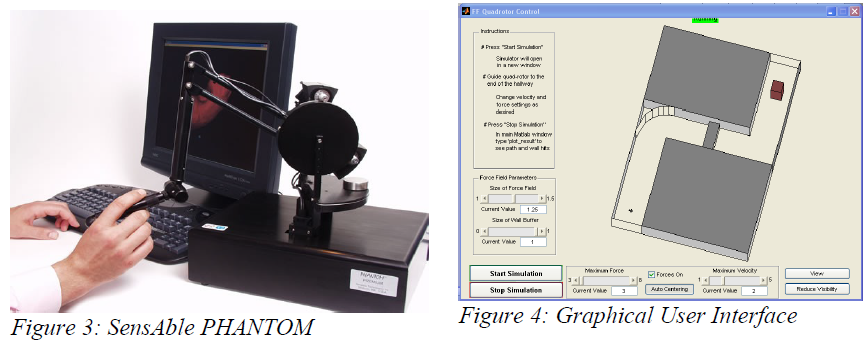
I created a computer simulation using Matlab’s Simulink, which simulates the autopilot and the quadrotor dynamics, and plots the quadrotor flying in an indoor environment. The velocity and yaw rate inputs are sent to the simulation by the SensAble PHANTOM, which is a 6 degree of freedom device with 3 degree of freedom force feedback capabilities. The PHANTOM is shown in Figure 3. The PHAMTOM also provides the haptic feedback to the user. I also created a graphical user interface that allows the user to change parameters of the risk field, the point of view, and start and stop the simulation. This is shown in Figure 4.The next step in my research is to do a user study using this simulation to determine the effectiveness and usefulness of my force feedback algorithms and of haptic collision avoidance in general.