
Stephen Carlson and Dr. Jerry Bowman, Mechanical Engineering
The mission of this project was the development of an Unmanned Air Vehicle capable of complete autonomy in a terrestrial environment. Using a jumping system for zero-distance take-offs and the addition of ground locomotion devices and energy harvesting systems, the vehicle could operate indefinitely without human assistance. Although this aircraft is unfinished, it and later design attempts have been tested to satisfy the basic fundamentals of this mission. The project will be continued until the stated mission objectives are achieved.
The design of the “SparrowHawk,” as it was named, began with calculations of the physics of the vehicle, such as it’s mass and jumping mechanism forces. A parametric spreadsheet was used to compile specifications on various components and materials, and to make these physical computations. This spreadsheet also included aerodynamic calculations, such as wing area and aspect ratio, tail volume, and different performance velocities. From this process, basic proportions of the vehicle were determined, and with these dimensions inhand, concept drawings could be made of the vehicle. As the design evolved, the aircraft and mechanisms became developed enough to start the 3D CAD modeling process.
The CAD model was designed in a hybrid bottom-up approach: Components such as servos, motor, battery, A/V telemetry system components, R/C components, and so on were modeled and placed into the assembly. Not-yet-modeled components such as the fuselage and wings were given fictitious placeholder shapes with mass values from the spreadsheet. Components were arraigned and re-arraigned as the fuselage and wings took shape, using the programs Centerof- Gravity calculation tool to keep within C-of-G constraints. The program also simulated the mechanisms built into the aircraft, including loads and stresses.
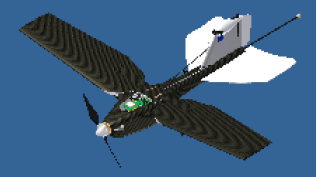
Although CAD modeling was a wonderful tool for visualizing and designing the aircraft, a stopping point could never seem to be reached for some elements, such as the interface between the articulating wings and fuselage. In an effort to force design finalization, the author started building the parts of the vehicle which were well defined, with the hopes that as the real vehicle was built, the CAD model would come to a point where these volatile elements would arrive at a solution. The frame of the vehicle was constructed from carbon fiber tubing and light plywood, with common R/C hardware used in the mechanisms of the jumping system. The fuselage pieces were positive plug / negative mould vacuum-bagged pieces, and the wings were fabricated by hot-wire cutting and vacuum-bagging.

Constructing the vehicle with the plans half finished did not accomplish anything for the CAD model problem. At this point, the better part of a summer had been used. Unable to recover from this design crisis, the author made a desperate move to resolve the situation. It was decided that a simpler plane would be built which would initially concentrate on ground locomotion only. This flying wing, named the “Bravo”, was modeled in CAD, constructed, and flown successfully within a period of 10 days. A crawling system was implemented on it that theoretically would allow for full locomotion on the ground, but in testing only achieved simply forward/backward movement on level ground. Efforts were made to build a jump mechanism for this vehicle, but were discontinued due to time and complexity.
Tests continued with the flying wing by trying to get it to lift-off vertically or at an angle from the ground in an effort to only have to design an elevating system instead of a jumping system for the flying wing. (An elevating system would only need to push the vehicle up 60 to 80 degrees, and not have to sustain the violent forces of a kinetic jump actuator.) These tests only re-enforced the intuition that had influenced the design of the Sparrowhawk: having a kinetic jump system is preferable to pure static thrust takeoff for a single-engined aircraft; loading enough power onto a payload-bearing aircraft for vertical flight only further increases the weight budget and decreases efficiency.

During the design and development of the Sparrowhawk and Bravo, the equipment for making a 2 kilometer proof-of-concept mission was acquired and tested on a simple R/C testbed aircraft. To extend the range of the equipment to the 2 kilometer mission goal, the author researched micro-strip patch antenna design and fabrication. Despite efforts to construct a perfect patch antenna, the best test article produced yielded a peak efficiency at 2.2GHz of 1dbi, tested using a network analyzer at BYU research facilities. (Desired metrics were 2.4 GHz and 8dbi to 10 dbi.) The author opted to continue the use of less-efficient quarter-wave dipole antennas unless range became a pressing issue. Test missions were conducted with this equipment to improve proficiency and to gain experience in long-range FPV-UAV flight.
The author also purchased an open-source autopilot, based on the Arduino physical computing platform and environment. The system was used to practice PID controller loop tuning on the testbed aircraft in an effort to add autonomous fail-safes to the proof-of-concept mission. This system was frustrated by environmental bias on its IR stabilization system due to tall mountain ranges in the testing area: This skewed horizon caused the aircraft to stabilize into a downward spiral or escape vector away from the mountain range.
Although little physical work was done on the project after the spring and summer, a provisional patent was secured on the ideas and mechanisms developed over the course of this project. In addition to this patent, great strides were made in documenting the project from the start to finish: Electronic, written and photographic records had been meticulously kept to facilitate presenting or publishing this project in a future engineering conference.
In all, this student researcher is thankful for the opportunity that was given to pursue this idea. Many thanks to my mentor, Dr. Jerry Bowman, the folks at BYU ORCA, and the sponsors at Well Fargo.