Pugh, McKinley
Using Frequency Noise Feedback to Stabilize Extended Cavity Diode Lasers for Use in Atomic Physics
Faculty Mentor: Dallin Durfee, Physics
Introduction
Diode lasers in particular are useful in atomic physics because they are durable, compact, and
relatively inexpensive. Unfortunately diode lasers also have linewidths that are much wider than
atomic transitions. One common method to narrow the linewidth of diode lasers is to add a
reflection grating outside the laser, creating an extended cavity diode laser (ECDL). While
ECDLs are effective at narrowing the linewidth, they also introduce so many variables that affect
the wavelength of the laser that small changes in the laser’s environment can cause the laser to
mode hop, or jump to an entirely different wavelength.
Previous attempts to reduce mode hoping in ECDLs have focused on passive control, i.e.
reducing changes to the laser’s environment. Very good passive control can prevent an ECDL
from mode hoping for days, but ECDLs with excellent passive control are expensive and more
importantly, even the best passive control cannot correct for the drift that will inevitably occur.
Once the laser drifts too much, and it will mode hop.
Previously in my lab, a correlation between frequency noise and mode hops in ECDLs has been
noticed. We believe we can use frequency noise to predict and prevent mode hops, thereby
allowing us to actively prevent mode hops instead of relying on passive control. I work this year
focused mostly on characterizing that frequency noise.
Methodology
For this project, I used a basic red diode laser, equivalent to those used laser pointers, housed in a
Thorlabs laser mount. A more expensive laser was not necessary because my goal was to prove
frequency noise could be used to improve the stability of an ECDL. A more stable ECDL would
simply have a higher of level of stability at the start. To create the ECDL, I placed a reflection
grating in a piezo mount in front of the laser. Due to mode competition in the laser, I could use
the position and angle of the reflection grating to control the wavelength of the laser. A lownoise
current driver was used to power the laser.
In order to determine if frequency noise predicted mode hops, I observed the laser unlocked. I
used two Fabry-Perot cavities. These optical cavities are able to differentiate between very small
differences in wavelengths. To observe the condition of the laser, I scanned on length of one
cavity. As the length changed, I observed the signal from the photodiode at the end of the cavity.
When the laser was single mode and stable, the signal resembled a number of thin, very evenly
spaced peaks. As the laser approaches a mode hop, smaller peaks appear between the primary
peaks and the primary peaks become smaller. From there, the laser will either mode hop, going
to an entirely new set of peaks, or go multimode, with numerous small peaks. The second cavity
I used to observe the frequency noise on the laser. Any change in the frequency was read as a
change in intensity on the photodiode. Thus, I could observe both the state of the laser and the
frequency noise of the laser at the same time. Though any ECDL will mode hop if left alone long
enough, I scanned the position of the refection grating to force the laser towards a mode hop so I
could observe the process more directly. To observe what frequencies made up the noise, I used
an oscilloscope to take the fast Fourier Transform of the signal from the non-scanned cavity.
Results
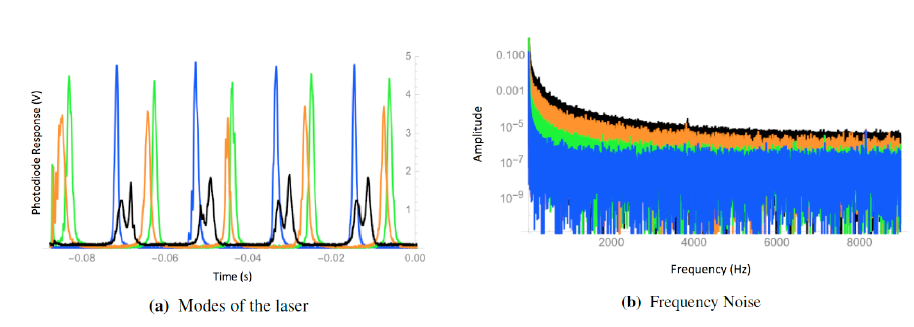
This year my main focus was to characterize the change in frequency noise as the laser
approached a mode hop. The modes and frequency noise of the laser at four different times are
shown in the graphs on the next page. In graph (a), the signal of the length-scanned cavity is
plotted. In graph (b), the Discrete Fourier Transform of the other cavity is graphed
on a log plot. The blue lines correspond to a very clean single mode. The black line corresponds
to the worst mode, and the closest to a mode hop. The cleanest modes have the least noise. As
the laser approaches a mode hop, the noise increases the most in the lower end of the spectrum,
though the baseline rises as well. This indicates that this noise can be used to create a suitable
signal for active control.
Discussion and conclusion
I have established that there is a correlation between mode hops and noise. I believe this noise is
frequency noise. However, because of the methods I used to measure the frequency noise, there
is a chance that some of the noise I observed was amplitude noise as well. Future work will lock
the cavity to the laser (instead of the laser to the cavity) and measure the amplitude of the laser
separately to better isolate and characterize the noise. We would also like to plot the noise level
verses current to get a better idea of how the laser approaches a mode hop. We believe that the
noise should follow a U-like shape, with low noise in the middle where the laser is stable and
higher noise on either side as the laser approaches a mode hop in either direction. Though I have
observed that the noise does increase before a mode hop, I do not know exactly what the noise as
a function of current looks like.
In conclusion, I have demonstrated the noise on the laser does increase before a mode hop. I
believe it is frequency noise, but there is a chance some of the noise I observed was amplitude
noise. Further work will be required in order to really characterize the noise. I have presented on
my work at the Frontiers in Optics/ Laser Science APS conference in October 2015 and at the
2016 March APS conference. I also used the project for my Senior Thesis.