
David Usevitch and Faculty Mentor: Mark Colton, Mechanical Engineering
Introduction
Haptic interfaces or devices are computercontrolled robotic systems that seek to replicate the touch experience of a human user1. The purpose of this research is to develop a viable variable-stiffness compliant joint for haptic interfaces that eliminate rotation joints or screw mechanisms that induce friction, increase weight and cost, and make devices more complex and prone to failure. The resulting compliant haptic device was designed with both affordability and dependability in mind, and hopes to result in research knowledge leading to realistic touch experiences as users interact with virtual or remote environments. The joint may also be applicable in other common future applications such as robotic arms and legs, rehabilitation robots, and haptic educational tools.
Methodology
Design of the novel haptic device began with creative brainstorming and concept elimination and selection. Based on inspiration and guidance from2, 10 separate feasible devices were designed. Model pros and cons were weighed in a matrix based on factors including, simplicity, range of motion, range of force, actuation method, sensing capability, durability, amount of friction, and material. The designs with the top three ratings were chosen for further 3D modeling and analysis (See Figure 1).
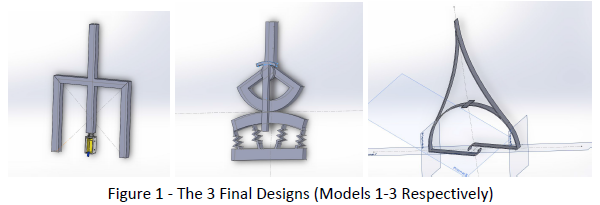
These three haptic configurations were modeled using SolidWorks 2015, based on feasibly sized dimensions for a common haptic paddle3. Dimensions were chosen based on reasonable sizes for a small haptic paddle device. Models were imported into Ansys Workbench 2015 for finite element analysis.
Techniques in finite analysis were used to confirm feasibility of design before construction to save time and expense. Spring steel or polypropylene were the assumed materials depending on model structure. Each model was meshed using triangular meshing, and mesh discretization was performed for improved accuracy in the results.
FEA analysis compared the resultant forces from the upper arms before and after loads were applied to the lower extremities of each model. Model 3 was chosen for further design and analysis based on its high performance of displaying a wide range of force feedback, and its novel design. Model 3 analysis compared the resultant force from the device at rest to the resultant force at the upper lever arm after the lower legs were displaced a specified amount (moved closer together to create a bending tension).
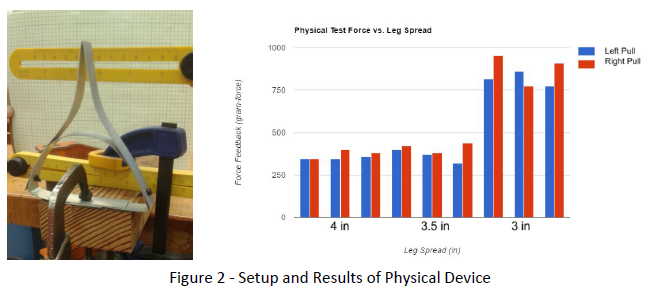
Construction of the final model was performed using a stainless steel sheet and attachment screws and nuts. The final working model was an example of a quick prototype used as proof of concept of the design. The device was clamped to a sturdy table and its legs stretched by the amounts listed in the results section. An analog force scale was used to provide force readouts of the main arm, after the device was secured. Multiple tests were performed and excerpts of data results can be seen in the results section.
Results
Model 3 showed the most promise according to FEA output, combining ease of manufacturing and proof of haptic feedback. It was created using a triangular meshing technique with 2560 nodes. There was an 8 N increase of the resultant force when the device was compared with an arm movement at rest to an arm movement of 1.27 cm (0.5 in) when it’s lower legs were displaced by 2 cm. This model was selected for the physical testing.
Tests for the fixture was performed by compressing the lower arms of the device together at intervals of 4, 3.5, and 3 in. This was to mimic the same motion as might occur if the legs were attached to a spinning motor, solenoid, etc. The main arm was then moved until the top point was displaced horizontally by 0.5 in. The force for physical displacement was then recorded and results can be seen in the figure below. Additional iterations were performed, but not included in this report. We are able to see that the physical device saw an overall 5.8 N resultant force increase between the positions tested.
Discussion
The model proved to be compliant and provide an adequate range of force feedback. As the distance between the legs decreased the physical force feedback was step-like and somewhat exponential in nature. Results for this device could vary based on dimensional differences and small design changes, and it is estimated that precision will increase over time as the model is refined.
Further work on testing might include more accurate manufacturing of the compliant mechanism design. Testing using better calibrated instruments, (ex. Instron tensile tester) and a larger number of repeated tests. Additional time in analyzing FEA tests would contribute significantly to an improved model as well.
Conclusion
This study resulted in a feasible design that proves itself valuable to further exploration. Compliant haptic devices ease the manufacturing process and improve the lifetime of mechanisms currently integrating similar devices.
References
- B. Hannaford, A. M. Okamura, Haptics, Springer Handbook of Robotics, Springer 2008, pg. 719 739
- Howell, L.L., Compliant Mechanisms, John Wiley & Sons, New York, NY, 2001.
- Orta Martinez, M., T. K. Morimoto, A. T. Taylor, A. C. Barron and J. D. A. Pultorak, J. Wang, A. CalasanzKaiser, R. L. Davis, P. Blikstein and A. M. Okamura (2016) 3D Printed Haptic Devices for Educational Applications. In IEEE Haptics Symposium, pages 126133