
Austin Rogers and Mark Colton, Mechanical Engineering
Introduction
The purpose of this research project was to improve the fidelity of haptic interfaces through the use of compliant mechanisms. “Haptics is the science and technology of experiencing and creating touch sensations in human operators” [1]. Traditional haptic interfaces include rigid links connected by rotary joints. The use of compliant mechanisms in place of rigid bodies and bearings could lead to more realistic touch sensations.
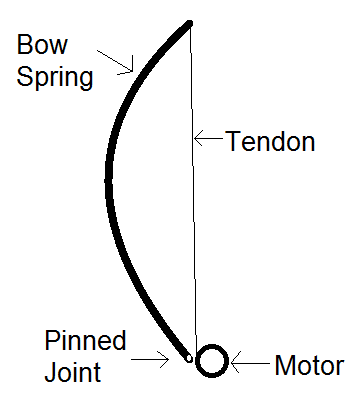
Figure 1: Single Actuator
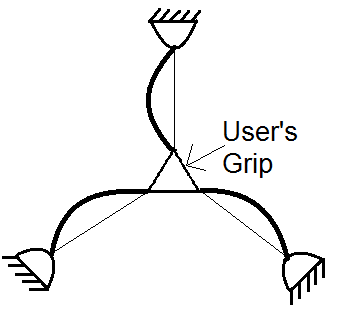
Figure 2: Proposed Device
A 2-D haptic interface design was proposed; this design (Figure 1 and Figure 2) consisted of three bow springs and tendon actuators connected in parallel to a handle. At the close of this project a single bow spring and tendon actuator has been tested and the mathematical relationships necessary to integrate three actuators into a 2-D haptic device have been developed.
Methodology
Kinematic and kinetic relationships (equations) were developed for the proposed haptic interface design. Kinematic relationships allow the location and orientation of the handle to be determined when given the length of each tendon. Kinetic relationships allow the necessary force in each actuator to be determined in order to achieve a desired force on the user.
A model was developed for the reaction force of the bow spring as a function of its deflection. Howell presents a pseudo rigid body model for determining the force-deflection relationship of a beam with pinned ends [2]. However, this model is valid for beams with a certain amount of initial curvature. For this project, a model was necessary for beams that do not meet this initial curvature requirement. A finite element model of the beam was developed using ANSYS software, and certain parameters of the pseudo rigid body model were optimized using a least-squares method to fit the finite element model. An experiment was performed using an Instron machine in order to validate the model. The experimental results yielded a force-deflection curve that was offset from what the model predicted by about 1 Newton. In final testing of the bow spring and tendon actuator the relationship obtained through experimentation was used.
A model was also developed for the force of the tendon as a function of the current applied to the motor. A steady-state model of the motor was used because it is expected that the haptic device would only undergo slow motions. An experiment was performed in order to validate this model, and it was found that the model performed satisfactorily.
Finally, the bow spring, the motor, and the tendon were combined in order to form a single bow spring and tendon assembly. Experiments were performed with an Instron machine in order to determine the capability of this actuator as a haptic device. The deflection was acquired using an Arduino Uno board and a potentiometer mounted directly to the motor shaft. The prototype system is shown in Figure 3.

Figure 3: Bow Spring and Tendon Prototype
Results
The bow spring and tendon actuator was tested against several desired force-deflection relationships. Figure 3 shows how the measured and desired curves compare for five tests. Figure 3 also shows the force-deflection model for the bow spring.
Discussion
Several limitations in the design of the bow spring and tendon actuator could contribute to the error seen in Figure 3. The fits between the tendon pulley, the potentiometer, and the motor shaft are loose. Also the tendon is made of fishing line that is far more elastic than is desired for this application. The period of larger oscillations seen in the experimental data suggest that these oscillations correspond with the circumference of the tendon pulley. It would be wise to repeat these experiments with a more rigid tendon material and with tighter tolerances.
Conclusion
This project has laid a solid foundation for investigating the capability of compliant mechanisms in haptic interfaces. Experimental results thus far suggest that bow spring and tendon actuators are a viable approach to achieving realistic touch sensations to the user.
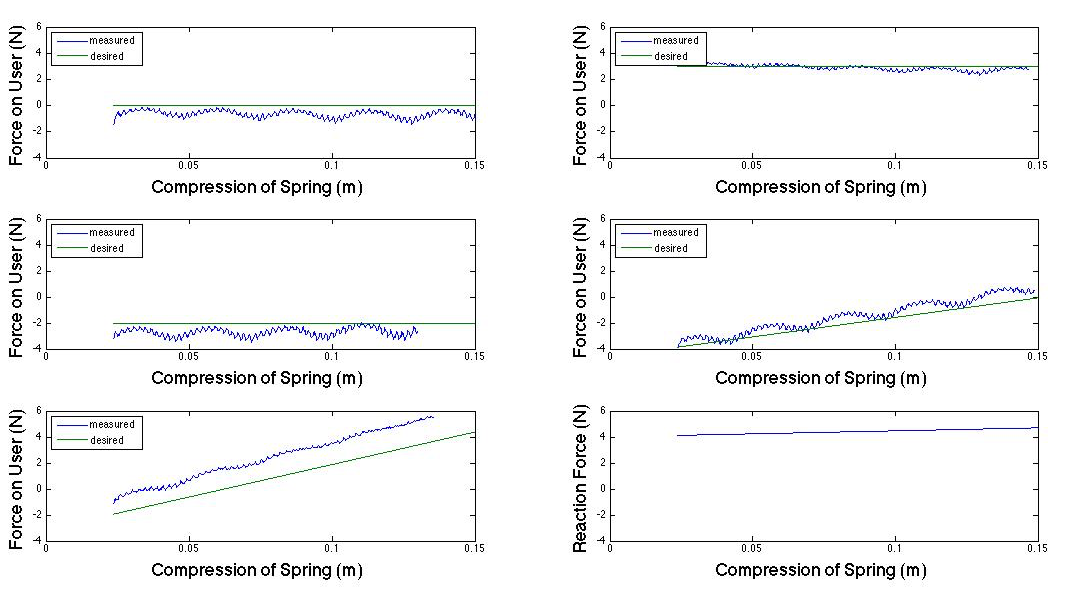
Figure 4: Five plots show the measured force vs. desired force of a single bow spring and tendon actuator. The last plot shows the
model used for the spring force-deflection relationship
References
- B. Hannaford, A. M. Okamura, Haptics, Springer Handbook of Robotics, Springer 2008, pg. 719 – 739
- Howell, L.L., Compliant Mechanisms, John Wiley & Sons, New York, NY, 2001.