Mark J. Cutler and Dr. Timothy McLain, Department of Mechanical Engineering
Small unmanned aerial vehicles (UAVs) are obtaining increasing utilization in many applications. Their small size (0.5-4m wingspan) allows them to fly close to the ground, providing useful observation and tracking data. This small size, however, comes at the expense of flight time. As UAV size decreases, the amount of stored energy (electrical or chemical) the UAV is able to carry also decreases. If long flight times are to be obtained with a small UAV, other energy sources must be exploited. Naturally occurring atmospheric phenomena provide one such potential energy source.
Significant research in the area of autonomous utilization of atmospheric energy for extending UAV flight times is currently being conducted by many universities and research institutions. The majority of this research, however, has focused on utilizing thermals, or pockets of warm rising air triggered by the uneven heating of the earth’s surface by the sun. The research conducted here, on the other hand, focused on orographic lift, or energy gained from wind moving over obstacles on the ground.
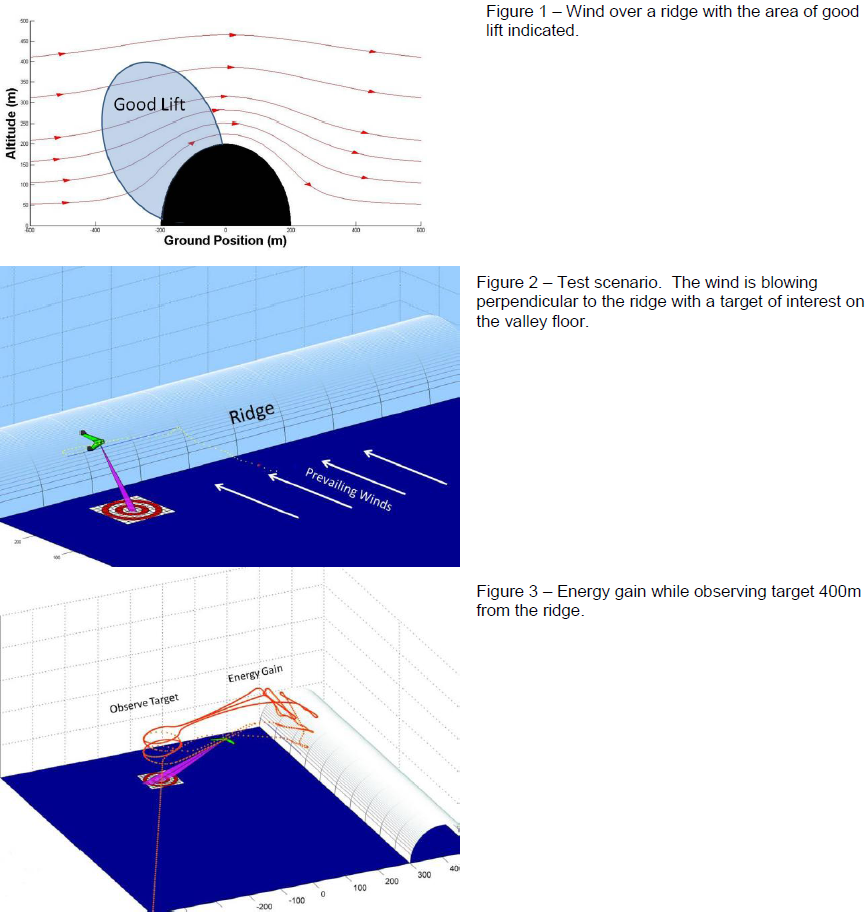
As wind blows over a mountain ridge, the wind is forced up and over the ridge (Fig. 1). Along the length of the ridge there exists a relatively small area of upward flowing air that can be exploited for UAV energy gain. As long as the vertical component of the flowing air is greater than the natural sink rate of the UAV, the UAV will maintain altitude without expending any of its onboard energy. Full-scale sailplane pilots use ridge lift regularly to travel long distances without the use of a motor, especially around Utah where ridges are plentiful. These pilots use prior knowledge of the surrounding geography, weather forecasts, and experience to predict where good ridge lift will be and how to best exploit it. UAVs, on the other hand, do not have people to control them and tell them where to go to find the best sources of lift. They rely on preprogrammed algorithms to autonomously search out and find good lift while simultaneously fulfilling their predetermined mission.
As a test case for autonomous ridge lift exploitation, and as a good way to develop algorithms, a high-fidelity computer simulation of a UAV flying next to a ridge was developed in this research. As Figure 2 shows, the prevailing winds were blowing perpendicular to the ridge and a target was placed at the bottom of the ridge. The UAV’s task was to observe the target as closely as possible (with an onboard camera) while expending the least amount of energy. Several different test cases were run with the target placed at different distances from the base of the 100m high ridge.
From Figure 3 it can be seen that the UAV was able to observe the target well with the target 400m away from the base of the ridge. To facilitate long-term observance of the target, the UAV gained energy at the base of the ridge by flying back and forth along the ridge, gaining altitude until it reached a predetermined altitude threshold. At this point, the UAV flew towards the target, circling over the target until its extra altitude was gone. The UAV then returned to the base of the ridge to repeat the process of energy gain.
While the exact scenario explored here may be overly simplistic, the idea is sound. There are many instances where a target of interest may reside at the base of an area of good orographic lift, such as beach fronts or mountainous terrain. The possibility of having persistent aerial surveillance of a particular target represents significant potential gains for both military and commercial interests. As further research is conducted in the area of autonomous ridge soaring, these potential gains will become a reality.