
Will Drake and Dr. Steven Charles, Department of Mechanical Engineering
The wrist plays a vital yet frequently overlooked role in positioning and supporting the hand during activities of daily living. Particularly during low-level activities (such as typing), passive joint stiffness dominates wrist dynamics and constitutes the main obstacle to motion. In spite of its importance, however, little consensus exists as to the exact range of passive wrist stiffness. Reported values vary from as little as 0.002 Nm/rad (Lehman & Calhoun, 1991) to as many as 9.0 Nm/rad (Crisco et al, 2010), a span of three orders of magnitude! The purpose of this research is to determine an approximate single-order-of-magnitude range for passive wrist stiffness (Nm/rad) in the four cardinal directions using as many independent techniques as possible.
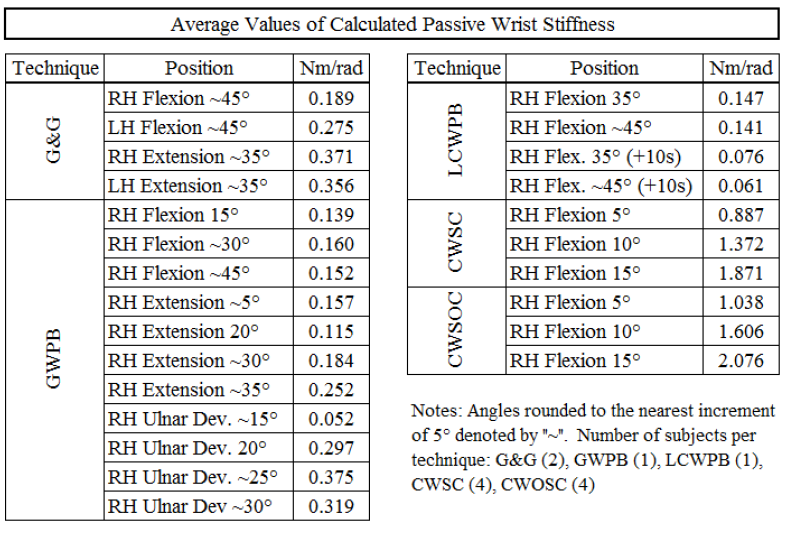
Passive wrist stiffness was calculated using five different techniques involving two distinct methods: gravity-induced wrist deflection (G-I), and variable force, externally-induced wrist deflection (E-I). Forearm pronation varied between zero (ZP), slight (SP), and nearly full pronation (NFP). For all techniques, stiffness was calculated using the applied force and the angle of displacement induced in the wrist joint. For techniques involving externally-induced deflections, the order of tests was randomized. The mass of the hand and its respective moment arm were estimated for each subject using de Leva’s adjusted segment parameters1. Experimental values are presented in the table at the end of the report; reported values represent the average of multiple tests on multiple subjects under the same conditions. IRB approval was obtained, and each participant gave informed consent.
Gravity and Goniometer (G&G): (G-I, SP) A goniometer was used to measure the angle between the subject’s forearm and wrist while the wrist deflected in flexion and extension.
Gravity with Peg Board (GWPB): (G-I, NFP) A peg board supported the subject’s forearm near the elbow and just proximally to the wrist, creating repeatable anatomical positions. Wrist angles were measured using a goniometer with reference to a plumb line.
Load Cell With Peg Board (LCWPB): (G-I and E-I, NFP) A peg board was used to create gravity-induced wrist angles as in GWPB. The hand was then pulled against gravity back to a predetermined zero position (with the third metacarpal approximately parallel to the radius) using a light weight sling and overhead pulley. A load cell in series with the sling measured the required force. Following reported trends2, stiffness exhibited significant creep (~50% of initial reading) over ten seconds after reaching the zero position.
Ceiling Support With Clamp (CSWC): (E-I, ZP) The subject sat at a table with the relaxed forearm constrained midway between pronation and supination in a custom wrist clamp, the wrist being allowed to hang freely from the limb. The hand was secured to a handle suspended from the ceiling, and a spring scale was used to move the wrist 5, 10, and 15 degrees from the resting position.
Ceiling Support Without Clamp (CSWOC): (E-I, ZP) A modification of CSWC attempting to show whether the wrist clamp contributed significantly to wrist stiffness by restricting the tendons ability to move freely3. In CSWOC, the wrist clamp was removed and forearm pro-sup was manually restricted by the researcher applying pressure to the subject’s radial styloid process. Stiffness values for this experiment were higher than those found using the CSWC setup for three subjects (p < 0.0005), while one subject exhibited lower stiffness than that for the CSWC setup (p < 0.005).
The present study provides significant evidence that stiffness values in flexion lie between 0.6 and 2.6 Nm/rad―a span of a single order of magnitude. Additional work is required to confirm the range for the other three directions. This result correlates well with the range published by Rijveld and Krebs4, and correlates loosely at the lower extreme with the range published by Gielen and Houk2. In addition, the data suggests that wrist stiffness may not be approximated as linear between 0° and 40° flexion without significant loss of validity. Lastly, the study has been extremely useful in gaining experience with the techniques and difficulties associated with collecting accurate wrist stiffness measurements, and has prompted important questions concerning the definition of the zero position, the source of creep, the degree of constraint of the hand (handle-clasp vs. unconstrained), the orientation of and method for constraining the wrist and forearm while taking measurements, and the possibility of a fundamental difference in reflex response between unfamiliar external forces (i.e. spring scale or load cell forces) and familiar external forces (i.e. gravity).
References
- De Leva, P. (1996). Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. Journal of biomechanics , 29 (9), 1223–1230.
- Gielen, C., & Houk, J. (1984). Nonlinear viscosity of human wrist. Journal of neurophysiology , 52 (3), 553.
- Johns, R., & Wright, V. (1962). Relative importance of various tissues in joint stiffness. Journal of applied Physiology , 17 (5), 824.
- Rijnveld, N., & Krebs, H. (2007). Passive Wrist Joint Impedance in Flexion-Extension and Abduction-Adduction. Rehabilitation Robotics, 2007. ICORR 2007. IEEE 10th International Conference on, (pp. 43–47).