
Adam Robertson and Dr. David V. Arnold, Electrical Engineering
The Microwave Earth Remote Sensing group in the BYU Department of Electrical Engineering has developed several Synthetic Aperture Radars (SAR). SARs transmit many short bursts of energy from a satellite or airplane. The bursts of energy are reflected by whatever is in their path. Some of the reflected signals return to the same place that they were transmitted from and are sampled by the radar system. Materials reflect the pulses differently depending on their roughness and their electromagnetic properties, similar to how light bouncing off an object may be bright or dull, blue or red. The received pulses are processed using signal processing techniques to form an image of the objects that were in the radar’s path.
One of BYU’s SAR was flown in several locations in Utah and at significant archaeological sites in Israel. The radar system is operated from a small aircraft flying at low altitudes. In the course of the development of these systems simulation has become necessary for studies in motion compensation and interferometery. The controlled environment of a simulation is helpful in understanding the effects of new signal processing techniques and error correction algorithms. I have worked on a point target simulation which generates the raw data that would be collected by a SAR in an aircraft moving in a non-linear path. The effect of the motion of the aircraft is a blurring of the radar image.
Figure 1 is the raw data that that would be collected by the SAR flying at an altitude of 300 m and a velocity of 72 m/s. SAR data is collected in range and azimuth. The range direction is perpendicular, and the azimuth direction parallel to, the radar’s path. As pulse is transmitted at each azimuth location. The time required for the radar pulse to return is a function of the distance to the target. The pulse is typically a Linear Frequency Modulated (LFM) chirp with a bandwidth of under a few hundred Mega-Hertz and a duration of a few micro-seconds. By assuming the position of the aircraft does not change significantly (motion << l) during the time that the chirp is transmitted and received, (less than 10 ms), the computational requirements of the simulator can be considerably reduced by accounting for motion only in the azimuth direction. Unless the motion of the aircraft is insignificant compared to a wavelength for the entire length of the synthetic aperture the effects of motion must be accounted for in azimuth. The time between azimuth samples is significant compared to the motion of the aircraft as evident by the empirical evidence in existing data sets.
Using simulated motion the position of the aircraft is accounted for at each azimuth sample. The yaw, pitch, and role of the aircraft determine where the beam of the radar antenna is directed, and thus the magnitude of the return as dependent on the far field antenna pattern. The time required for the radar pulse, traveling at the speed of light, to reach the point target and return determines if the target would return a signal at a given range bin, and if so, the magnitude and phase of the return. The incidence angle dependence of the reflectivity of the surface, so, is also accounted for in the simulation.
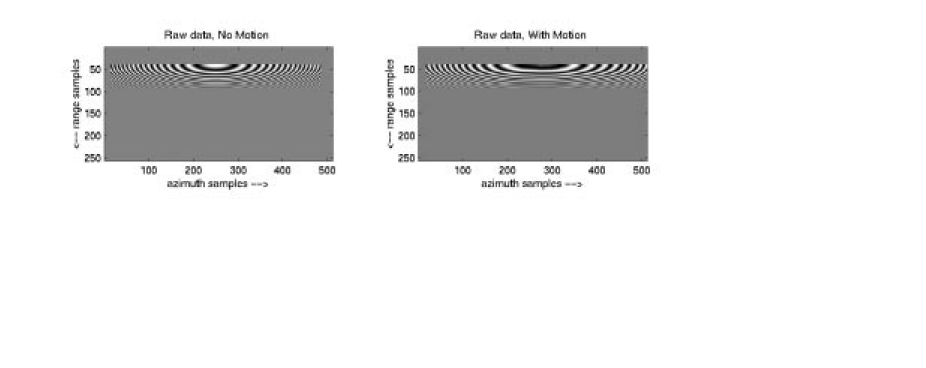
Fig. 1 SAR raw data for a point target with and without motion.
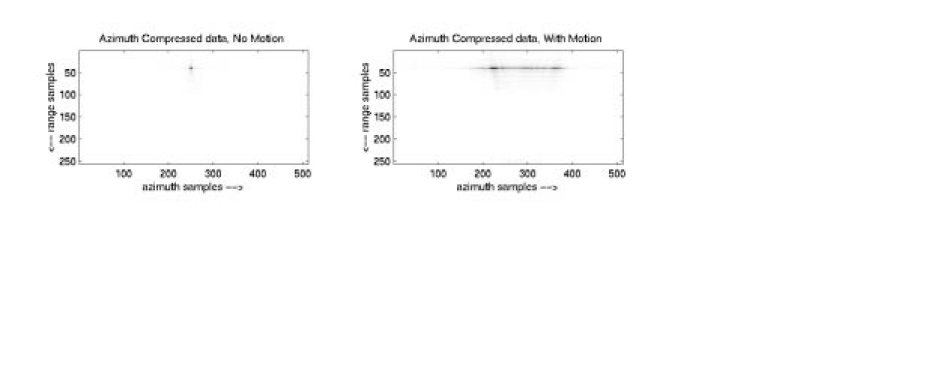
Fig 2. Range and Azimuth compressed SAR data for a point target with and without motion.
Figures 1 – 2 are point target simulation examples. Fig. 1 is the raw data generated by my simulator. The simulator is accurate enough to manifest range curvature. The point target response looks similar to the ripples resulting from a pebble dropped in a pond. The raw data with motion looks like the ripples from a pebble dropped in slightly turbulent water, analogous to the effects of aircraft turbulence. Fig. 2 is the result of taking the raw data in Fig. 1 and performing a matched filter in range and azimuth. An ideal point target without motion is shown on the left, and the blurring effect of motion on the same target is shown on the right. Actual SAR images are many point targets placed very close together so that they form an image. When each target is blurred by motion the resulting image is entirely out of focus. The blur may be slight enough only to decrease the resolution, or severe enough to render the data useless.